Метод гармонической линеаризации: Методические указания к лабораторной работе. Вычисление коэффициентов гармонической линеаризации Метод гармонической линеаризации автоколебания matlab
Назначение метода гармонической линеаризации .
Идея метода гармонической линеаризации была предложена в 1934г. Н. М. Крыловым и Н. Н. Боголюбовым. Применительно к системам автоматического управления этот метод разработан Л. С. Гольдфарбом и Е. П. Поповым. Другие названия этого метода и его модификаций - метод гармонического баланса, метод описывающих функций, метод эквивалентной линеаризации.
Метод гармонической линеаризации - это метод исследования автоколебаний. Он позволяет определять условия существования и параметры возможных автоколебаний в нелинейных системах.
Знание параметров автоколебаний позволяет представить картину возможных процессов в системе и, в частности, определить условия устойчивости. Предположим, например, что в результате исследования автоколебаний в некоторой нелинейной системе мы получили зависимость амплитуды этих автоколебаний А от коэффициента передачи k линейной части системы, показанную на рис.12.1, и знаем, что автоколебания устойчивы.
Из графика следует, что при большом значении коэффициента передачи k, когда k > k кр, в системе существуют автоколебания. Их амплитуда уменьшается до нуля при уменьшении коэффициента передачи k до k кр. На рис.12.1 стрелками условно показан характер переходных процессов при разных значениях k : при k > k кр переходный процесс, вызванный начальным отклонением, стягивается к автоколебаниям. Из рисунка видно, что при k < k кр, система оказывается устойчивой. Таким образом, k кр – это критическое по условию устойчивости значение коэффициента передачи. Его превышение приводит к тому, что исходный режим системы становится неустойчивым и в ней возникают автоколебания. Следовательно, знание условий существования автоколебаний в системе позволяет определить и условия устойчивости.
Идея гармонической линеаризации.
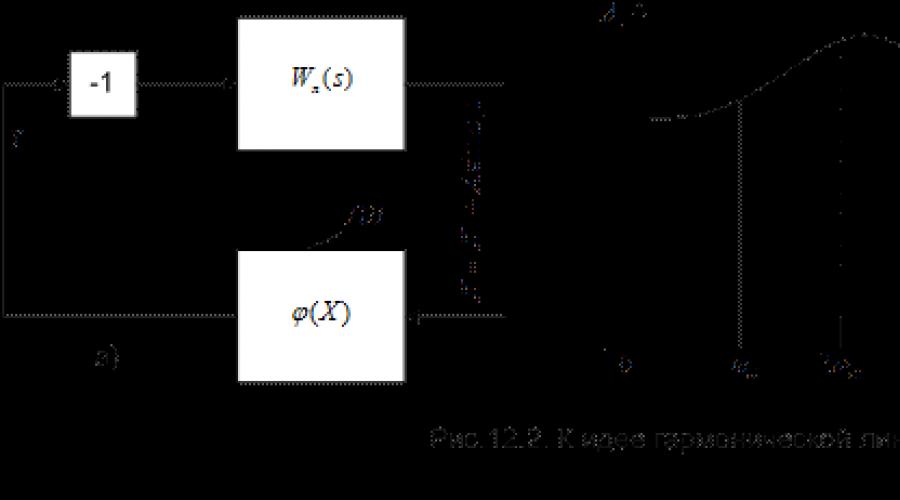
Рассмотрим нелинейную систему, схема которой представлена на рис.12.2, а. Система состоит из линейной части с передаточной функцией W л (s ) и нелинейного звена НЛ с конкретно заданной характеристикой . Звено с коэффициентом - 1 показывает, что обратная связь в системе отрицательна. Полагаем, что в системе существуют автоколебания, амплитуду и частоту которых мы хотим найти. В рассматриваемом режиме входная величина Х нелинейного звена и выходная Y являются периодическими функциями времени.

Метод гармонической линеаризации основан на nредnоложении, что колебания на входе нелинейного звена являются синусоидальны.ми ,т. е. что
![]() , (12.1)
, (12.1)
где А – амплитуда и - частота этих автоколебаний, а - возможная в общем случае постоянная составляющая, когда автоколебания несимметричны.
В действительности автоколебания в нелинейных системах всегда несинусоидальны вследствие искажения их формы нелинейным звеном. Поэтому указанное исходное предположение означает, что метод гармонической линеаризации является принципиально приближенным и область его применения ограничена случаями, когда автоколебания на входе нелинейного звена достаточно близки к синусоидальным. Для того чтобы это имело место, линейная часть системы должна не пропускать высших гармоник автоколебаний, т. е. являться фильтром нижних частот . Последнее иллюстрируется рис. 12.2, б. Если, например, частота автоколебаний равна , то линейная часть с показанной на рис. 12.2, б АЧХ будет играть роль фильтра нижних частот для этих колебаний, так как уже вторая гармоника, частота которой равна 2 , практически не пройдет на вход нелинейного звена. Следовательно, в этом случае метод гармонической линеаризации применим.
Если частота автоколебаний равна , линейная часть будет свободно пропускать вторую, третью и другие гармоники автоколебаний. В этом случае нельзя утверждать, что колебания на входе нелинейного звена будут достаточно близки к синусоидальным, т.е. необходимая для применения метода гармонической линеаризации предпосылка не выполняется.
Для того чтобы установить, является ли линейная часть системы фильтром нижних частот и тем самым определить применимость метода гармонической линеаризации, необходимо знать частоту автоколебаний. Однако ее можно узнать только в результате использования этого метода. Таким образом, пpимeнимocть метода гармонической лuнеарuзацuu прuходuтся определять уже в конце uсследованuя в порядке проверки.
Заметим при этом, что если в результате этой проверки гипотеза о том, что линейная часть системы играет роль фильтра нижних частот, не подтверждается, это не означает еще неверности полученных результатов, хотя, разумеется, ставит их под сомнение и требует дополнительной проверки каким-либо другим методом.
Итак, предположив, что линейная часть системы есть фильтр нижних частот, считаем, что автоколебания на входе нелинейного звена синусоидальны, т.е имеют вид (12.1). Колебания на выходе этого звена будут при этом уже несинусоидальными вследствие их искажения нелинейностью. В качестве примера на рис. 12.3 построена кривая на выходе нелинейного звена для определенной амплитуды входного чисто синусоидального сигнала по характеристике звена, приведенной там же.

Рис.12.3. Прохождение гармонического колебания через нелинейное звено.
Однако, поскольку мы считаем, что линейная часть системы пропускает только основную гармонику автоколебаний, имеет смысл интересоваться только этой гармоникой на выходе нелинейного звена. Поэтому разложим выходные колебания в ряд Фурье и отбросим высшие гармоники. В результате получим:
![]() ;
;
![]() ; (12.3)
; (12.3)
![]() ;
;
![]() .
.
Перепишем выражение (12.2) в более удобном для последующего использования виде, подставив в него получающиеся из (12.1) следующие выражения для и :
Подставив эти выражения в (12.2), будем иметь:
![]() (12.4)
(12.4)
![]() . (12.5)
. (12.5)
Здесь введены обозначения:
![]() . (12.6)
. (12.6)
Дифференциальное уравнение (12.5) справедливо для синусоидального входного сигнала (12.1) и определяет выходной сигнал нелинейного звена без учета высших гармоник.
Коэффициенты в соответствии с выражениями (12.3) для коэффициентов Фурье являются функциями постоянной составляющей , амплитуды А и частоты автоколебаний на входе нелинейного звена. При фиксированных А , и уравнение (12.5) является линейным. Таким образом, если отбросить высшие гармоники, то для фиксированного гармонического сигнала исходное нелинейное звено может быть заменено эквивалентным линейным, описываемым уравнением (12.5). Эта замена и называется гармонической линеаризацией .
На рис. 12.4 условно изображена схема этого звена, состоящая из двух параллельных звеньев.

Рис. 12.4. Эквивалентное линейное звено, полученное в результате гармонической линеаризации.
Одно звено () пропускает постоянную составляющую, а другое – только синусоидальную составляющую автоколебаний.
Коэффициенты называются коэффициентами гармонической линеаризации или гармоническими коэффициентами передачи : - коэффициент передачи постоянной составляющей, а - два коэффициента передачи синусоидальной составляющей автоколебаний. Эти коэффициенты определяются нелинейностью и значениями и по формулам (12.3). Существуют определенные по этим формулам готовые выражения для для ряда типовых нелинейных звеньев. Для этих и вообще всех безынерционных нелинейных звеньев величины не зависят от и являются функциями только амплитуды А и .
При подаче на вход линейной системы гармонического сигнала
на выходе системы также устанавливается гармонический сигнал, но с другой амплитудой и смещенный по фазе по отношению к входному. Если же синусоидальный сигнал подать на вход нелинейного элемента, то на его выходе формируются периодические колебания, но по форме существенно отличающиеся от синусоидальных. В качестве примера на рис. 8.17 показан характер изменения выходной переменной нелинейного элемента с релейной характеристикой (8.14) при поступлении на его вход синусоидальных колебаний (8.18).
Разлагая периодический сигнал на выходе нелинейного элемента в ряд Фурье, представляем в виде суммы постоянной составляющей и бесконечного множества гармонических составляющих:
![]() ,
(8.19)
,
(8.19)
 где
–
постоянные коэффициенты ряда
Фурье;
–
частота колебаний первой гармоники
(основная частота), равная частоте
входных синусоидальных колебаний;Т –
период колебания первой гармоники,
равный периоду входных синусоидальных
колебаний.
где
–
постоянные коэффициенты ряда
Фурье;
–
частота колебаний первой гармоники
(основная частота), равная частоте
входных синусоидальных колебаний;Т –
период колебания первой гармоники,
равный периоду входных синусоидальных
колебаний.
Выходной сигнал нелинейного элемента поступает на вход линейной части САУ (см. рис. 8.1), которая, как правило, обладает существенной инерционностью. При этом высокочастотные составляющие сигнала (8.19) практически не проходят на выход системы, т.е. линейная часть является фильтром по отношению к высокочастотным гармоническим составляющим. В связи с этим, а также учитывая, что амплитуды гармонических составляющих в уменьшаются с ростом частоты гармоники, для приближенной оценки выходной величины нелинейного элемента, в большом числе случаев достаточно учитывать только первую гармоническую составляющую в .
Следовательно, при отсутствии постоянной составляющей в выходных колебаниях выражение (8.19) приближенно можно записать в виде:
Выражая из формулы (8.20) функцию
,
а из производной
![]() –
функцию
–
функцию
![]() ,
преобразуем выражение (8.20) следующим
образом:
,
преобразуем выражение (8.20) следующим
образом:
![]() .
(8.21)
.
(8.21)
Таким образом, нелинейная зависимость выходной величины от входной в нелинейном элементе приближенно заменяется линейной зависимостью, описываемой выражением (8.21).
Выполнив в выражении (8.21) преобразование Лапласа, получим:
![]()
Как и для непрерывных звеньев введем в рассмотрение передаточную функцию нелинейного гармонически линеаризованного элемента , как отношение изображения выходной величины к изображению входной величины:
![]() .
(8.22)
.
(8.22)
Таблица 8.1
Коэффициенты гармонической линеаризации типовых нелинейностей
|
Статическая характеристика нелинейного элемента | ||
|
Линейная характеристика с зоной нечувствительности |
| |
|
Линейная характеристика с ограничением |
| |
|
Линейная характеристика с зоной нечувствительности и ограничением |
| |
|
Характеристика «люфт» |
| |
|
Идеальная релейная характеристика | ||
|
Однозначная релейная характеристика с зоной нечувствительности |
| |
|
Неоднозначная релейная характеристика с зоной нечувствительности |
|
|
|
Кубическая парабола: | ||
|
Характеристика «петля гистерезиса» |
|
|






Передаточная функция нелинейного элемента имеет существенное отличие от передаточной функции линейной системы , заключающееся в том, что зависит от амплитуды и частоты входного сигнала.
Выражение (8.22) запишем в виде:
q (A ) + q 1 (A ), (8.23)
где q(A) ,q 1 (A) – коэффициенты гармонической линеаризации, определяемые как отношения коэффициентов ряда Фурье для первой гармоники выходных колебаний к амплитуде входных колебаний:
q (A ) = q 1 (A ) = . (8.24)
Заменяя в выражении (8.23) р на , получим выражение длякомплексного коэффициента передачи нелинейного элемента :
q (A ) +j q 1 (A ), (8.25)
являющегося аналогом АФХ для линейного звена.
В качестве примера определим выражение для комплексного коэффициента передачи нелинейного элемента с релейной статической характеристикой (8.14). Коэффициенты ряда Фурье A 1 и B 1 для указанной нелинейности равны:
B 1 .
Очевидно, что коэффициент B 1 будет равен нулю для любого нелинейного элемента с нечетно-симметричной статической нелинейностью.
где - передаточная функция линейной части системы; - передаточная функция нелинейного элемента после его линеаризации.
Если
![]() ,
то выражение (8.26) можно записать в
виде:
,
то выражение (8.26) можно записать в
виде:
Заменяя в выражении (8.27) р на , получим комплексное выражение, в котором необходимо выделить вещественную и мнимую части:
[ q (A ) +j q 1 (A ) ] . (8.28)
При этом условие возникновения периодических колебаний в системе с частотой и амплитудой запишем:
 (8.29)
(8.29)
Если решения системы (8.29) комплексные или отрицательные, режим автоколебаний в системе невозможен. Наличие положительных вещественных решений для и свидетельствует о наличии в системе автоколебаний, которые необходимо проверить на устойчивость.
В качестве примера найдем условия возникновения автоколебаний в САУ, если передаточная функция ее линейной части равна:
![]() (8.30)
(8.30)
и нелинейным элементом типа «петля гистерезиса».
Передаточная функция гармонически линеаризованного нелинейного элемента (см. табл. 8.1) имеет вид:
![]() .
(8.31)
.
(8.31)
Подставляя выражения (8.30) и (8.31) в выражение (8.26) и заменяя р на , найдем выражение для :
Отсюда в соответствии с выражением (8.29) получаем следующие условия возникновения автоколебаний в системе:

Решение системы уравнений (8.29) обычно затруднительно, так как коэффициенты гармонической линеаризации имеют сложную зависимость от амплитуды входного сигнала. Кроме того, помимо определения амплитуды и частоты , необходимо оценить устойчивость автоколебаний в системе.
Условия возникновения автоколебаний в нелинейной системе и параметры предельных циклов можно исследовать, используя частотные критерии устойчивости, например, критерий устойчивости Найквиста. Согласно этому критерию при наличии ав токолебанийамплитудно-фазовая характеристика разомкнутой гармонически линеаризованной системы, равная
проходит через точку (-1, j0). Следовательно, для и справедливо равенство:
![]() .
(8.32)
.
(8.32)
Решение уравнения (8.32) относительно частоты и амплитуды автоколебаний можно получить графически. Для этого на комплексной плоскости необходимо, изменяя частоту от 0 до , построить годограф АФХ линейной части системы и, изменяя амплитудуА от 0 до , построить годограф обратной характеристики нелинейной части , взятый с знаком «минус». Если эти годографы не пересекаются, то режим автоколебаний в исследуемой системе не существует (рис. 8.18, б).
 При
пересечении годографов (рис. 8.18, а)
в системе возникают автоколебания,
частота и амплитуда которых
определяются значениями
и
в
точке пересечения..
При
пересечении годографов (рис. 8.18, а)
в системе возникают автоколебания,
частота и амплитуда которых
определяются значениями
и
в
точке пересечения..
Если и - пересекаются в нескольких точках (рис. 8.18, а), то это свидетельствует о наличии в системе нескольких предельных циклов. При этом колебания в системе могут быть устойчивыми и неустойчивыми.
Устойчивость автоколебательного режима оценивается следующим образом. Режим автоколебаний устойчив, если точка на годографе нелинейной части , соответствующая амплитуде большей по сравнению со значением в точке пересечения годографов, не охватывается годографом частотной характеристики линейной части системы. В противном случае автоколебательный режим неустойчив.
На рис. 8.18, а годографы пересекаются в точках 1 и 2. Точка 1 определяет неустойчивый режим автоколебаний, так как точка годографа , соответствующая увеличенной амплитуде, охватывается годографом частотной характеристики линейной части системы. Точке 2 соответствует устойчивый режим автоколебаний, амплитуда которых определяется по годографу а частота – по годографу .
В качестве примера оценим устойчивость автоколебаний в двух нелинейных системах. Будем полагать, что передаточные функции линейных частей этих систем совпадают и равны:
![]() ,
,
но входящие в них их нелинейные элементы различны. Пусть в первую систему включен нелинейный элемент «идеальное реле», описываемый системой (8.14), а во вторую – нелинейный элемент со статической характеристикой «кубическая парабола». Воспользовавшись данными таблицы 8.1, получим:
 На
рис. 8.19 изображены годографы
этих
систем совместно с годографом АФХ
линейной части системы
.
На основании изложенного можно утверждать,
что в первой системе возникают
устойчивые автоколебания с частотой
и
амплитудой
,
а во второй системе автоколебания
неустойчивые.
На
рис. 8.19 изображены годографы
этих
систем совместно с годографом АФХ
линейной части системы
.
На основании изложенного можно утверждать,
что в первой системе возникают
устойчивые автоколебания с частотой
и
амплитудой
,
а во второй системе автоколебания
неустойчивые.
Министерство образования и науки Российской Федерации
Саратовский государственный технический университет
Балаковский институт техники, технологии и управления
Метод гармонической линеаризации
Методические указания к лабораторной работе по курсу «Теория автоматического управления» для студентов специальности 210100
Одобрено
редакционно –издательским советом
Балаковского интститута техники,
технологии и управления
Балаково 2004
Цель работы: Изучение нелинейных систем с помощью метода гармонической линеаризации (гармонического баланса), определение коэффициентов гармонической линеаризации для различных нелинейных звеньев. Получение навыков по нахождению параметров симметричных колебаний постоянной амплитуды и частоты (автоколебаний), используя алгебраический, частотный способы, а также с помощью критерия Михайлова.
ОСНОВНЫЕ СВЕДЕНИЯ
Метод гармонической линеаризации относится к приближенным методам исследования нелинейных систем. Он позволяет достаточно просто и с приемлемой точностью оценивать устойчивость нелинейных систем, определять частоту и амплитуду установившихся в системе колебаний.
Предполагается, что исследуемая нелинейная САУ может быть представлена в следующем виде
причем нелинейная часть должна иметь одну нелинейность
Эта нелинейность может быть как непрерывной, так и релейной, однозначной или гистерезисной.
Любую функцию или сигнал можно разложить в ряд по системе линейно-независимых, в частном случае ортонормированных функций. В качестве такого ортогонального ряда может быть использован ряд Фурье.
Разложим в ряд Фурье выходной сигнал нелинейной части системы
 ,
(2)
,
(2)
здесь - коэффициенты Фурье,
 ,
,
 ,
,
 .
(3)
.
(3)
Таким образом,
сигнал
согласно
(2) может быть представлен в виде
бесконечной суммы гармоник с возрастающими
частотами
![]() и т. д. Этот сигнал поступает на вход
линейной части нелинейной системы.
и т. д. Этот сигнал поступает на вход
линейной части нелинейной системы.
Обозначим передаточную функцию линейной части
![]() ,
(4)
,
(4)
причем степень полинома числителя должна быть меньше степени полинома знаменателя. В этом случае АЧХ линейной части имеет вид

где 1 - не имеет полюсов, 2 - имеет полюс или полюса.
Для АЧХ справедливо записать
Таким образом, линейная часть нелинейной системы является фильтром высоких частот. В этом случае линейная часть будет пропускать без ослабления только низкие частоты, высокие же по мере роста частоты будут существенно ослабляться.
В методе гармонической линеаризации делается предположение о том, что линейная часть системы будет пропускать только постоянную составляющую сигнала и первую гармонику. Тогда сигнал на выходе линейной части будет иметь вид
Этот сигнал проходит по всему замкнутому контуру системы Рис.1 и на выходе нелинейного элемента без учета более высоких гармоник, согласно (2) имеем
![]() .
(7)
.
(7)
При исследовании нелинейных систем с помощью метода гармонической линеаризации возможны случаи симметричных и несимметричных колебаний. Рассмотрим случай симметричных колебаний. Здесь и.
Введем следующие обозначения
Подставив их в (7), получим . (8)
С учетом того, что
![]() .
(9)
.
(9)
Согласно (3) и (8) при
 ,
,
 .
(10)
.
(10)
Выражение (9) является гармонической линеаризацией нелинейности устанавливает линейную связь входной переменной и выходной при . Величины и называются коэффициентами гармонической линеаризации.
Необходимо отметить, что уравнение (9) является линейным для конкретных величин и (амплитуды и частоты гармонических колебаний в системе). Но в целом оно сохраняет нелинейные свойства, так как коэффициенты различны для различных и . Эта особенность и позволяет исследовать с помощью метода гармонической линеаризации свойства нелинейных систем [ Попов Е.П.].
В случае несимметричных колебаний гармоническая линеаризация нелинейности приводит к линейному уравнению
 ,
,
 ,
,
 .
(12)
.
(12)
Так же как и уравнение (9), линеаризованное уравнение (11) сохраняет свойства нелинейного элемента, так как коэффициенты гармонической линеаризации , , а так же постоянная составляющая зависят и от смещения и от амплитуды гармонических колебаний .
Уравнения (9) и (11) позволяют получить передаточные функции гармонически линеаризованных нелинейных элементов. Так для симметричных колебаний
![]() ,
(13)
,
(13)
при этом частотная передаточная функция
зависит только от амплитуды и не зависит от частоты колебаний в системе.
Необходимо отметить, что если нечетно-симметричная нелинейность однозначна, то в случае симметричных колебаний в соответствии с (9) и (10) получим, что , (15)

 (16)
(16)
и линеаризованная нелинейность имеет вид
Для неоднозначных нелинейностей (с гистерезисом) интеграл в выражении (16) не равен нулю, вследствие различия в поведении кривой при возрастании и убывании , поэтому справедливо полное выражение (9).
Найдем коэффициенты гармонической линеаризации для некоторых нелинейных характеристик. Пусть нелинейная характеристика имеет вид релейной характеристики с гистерезисом и зоной нечувствительности. Рассмотрим, как гармонические колебания проходят через нелинейный элемент с такой характеристикой.

При выполнении условия , то есть если амплитуда входного сигнала меньше зоны нечувствительности , то сигнал на выходе нелинейного элемента отсутствует. Если же амплитуда , то реле переключается в точках A, B, C и D. Обозначим и .
![]() ,
,
![]() .
(18)
.
(18)
При вычислении коэффициентов гармонической линеаризации следует иметь ввиду, что при симметричных нелинейных характеристиках интегралы в выражениях (10) находятся на полупериоде (0, ) с последующим увеличением результата в два раза. Таким образом
 ,
,
 .
(19)
.
(19)
Для нелинейного элемента с релейной характеристикой и зоной нечувствительности
 ,
,
Для нелинейного элемента, имеющего релейную характеристику с гистерезисом
 ,
,
Аналогично могут быть получены коэффициенты гармонической линеаризации для других нелинейных характеристик.
Рассмотрим два способа определения симметричных колебаний постоянной амплитуды и частоты (автоколебаний) и устойчивости линеаризованных систем: алгебраический и частотный. Сначала рассмотрим алгебраический способ. Для замкнутой системы Рис.1 передаточная функция линейной части равна
![]() .
.
Запишем гармонически линеаризованную передаточную функцию нелинейной части
![]() .
.
Характеристической уравнение замкнутой системы имеет вид
![]() .
(22)
.
(22)
Если в исследуемой системе возникают автоколебания, то это говорит о наличии двух чисто мнимых корней в ее характеристическом уравнении. Поэтому подставим в характеристическое уравнение (22) значение корня .
![]() .
(23)
.
(23)
Представим
Получим два уравнения, определяющих искомую амплитуду и частоту
![]() ,
,
![]() .
(24)
.
(24)
Если в решении возможны вещественные положительные значения амплитуды и частоты , то в системе могут возникнуть автоколебания. Если же амплитуда и частота не имеет положительных значений, то автоколебания в системе невозможны.
Рассмотрим пример 1. Пусть исследуемая нелинейная система имеет вид

В этом примере нелинейный элемент представляет собой чувствительный элемент с релейной характеристикой, для которого коэффициенты гармонической линеаризации
Исполнительное устройство имеет передаточную функцию вида
Передаточная функция объекта регулирования равна
![]() .
(27)
.
(27)
Передаточная функция линейной части системы
![]() ,
(28)
,
(28)
На основании (22), (25) и (28) запишем характеристическое уравнение замкнутой системы
![]() ,
(29)
,
(29)
![]() ,
,
Пусть 1/сек, сек, сек, в.
В этом случае параметры периодического движения равны
 7,071
,
7,071
,
Рассмотрим способ определения параметров автоколебаний в линеаризованной САУ с помощью критерия Михайлова. Способ основан на том, что при возникновении автоколебаний система будет находиться на границе устойчивости и годограф Михайлова в этом случае будет проходить через начало координат.
В примере 2 найдем параметры автоколебаний при том условии, что нелинейный элемент в системе Рис.4 представляет собой чувствительный элемент, имеющий релейную характеристику с гистерезисом, для которого коэффициенты гармонической линеаризации
 ,
,
Линейная часть осталась неизменной.
Запишем характеристическое уравнение замкнутой системы
Годограф Михайлова получается заменой .
Задача заключается в том, чтобы подобрать такую амплитуду колебаний , при которой годограф пройдет через начало координат. Необходимо отметить, что при этом текущая частота , так как именно в этом случае кривая пройдет через начало координат.
Расчеты, проведенные в MATHCAD 7 при 1/сек, сек, сек, в и в, дали следующие результаты. На Рис.5 годограф Михайлова проходит через начало координат. Для повышения точности расчетов увеличим нужный фрагмент графика. На Рис.6 приведен фрагмент годографа, увеличенный в окрестности начала координат. Кривая проходит через начало координат при в.


Рис.5. Рис.6.
Частоту колебаний при этом можно найти из условия равенства нулю модуля . Для частот
значения модуля сведены в таблицу
Таким образом, частота колебаний 6,38 . Необходимо отметить, что точность расчетов легко может быть увеличена.
Полученное периодическое решение, определяемое значением амплитуды и частоты , необходимо исследовать на устойчивость. Если решение устойчиво, то в системе имеет место автоколебательный процесс (устойчивый предельный цикл). В противном случае предельный цикл будет неустойчивым.
Проще всего для исследования устойчивости периодического решения использовать критерий устойчивости Михайлова в графическом виде. Было установлено, что при кривая Михайлова проходит через начало координат. Если дать малое приращение , то кривая займет положение либо выше нуля, либо ниже. Так в последнем примере дадим приращение в, то есть и . Положение кривых Михайлова показано на Рис.7.

При кривая проходит выше нуля, что говорит об устойчивости системы и затухающем переходном процессе. При кривая Михайлова проходит ниже нуля, система является неустойчивой и переходный процесс является расходящимся. Таким образом периодическое решение с амплитудой в и частотой колебаний 6,38 устойчиво.
Для исследования устойчивости периодического решения может быть использован и аналитический критерий, получаемый из графического критерия Михайлова. Действительно, чтобы узнать пойдет ли кривая Михайлова при выше нуля достаточно посмотреть, куда будет перемещаться точка кривой Михайлова, которая при находится в начале координат.

Если разложить перемещение этой точки по координатным осям X и Y, то для устойчивости периодического решения вектор, определяемый проекциями на координатные оси
должен быть расположен справа от касательной MN к кривой Михайлова, если смотреть вдоль кривой в сторону возрастания , направление которой определяется проекциями
Аналитическое условие устойчивости запишем в следующем виде
В этом выражении частные производные берутся по текущему параметру кривой Михайлова
![]() ,
,
Необходимо отметить, что аналитическое выражение критерия устойчивости (31) справедливо только для систем не выше четвертого порядка, так как например для системы пятого порядка в начале координат условие (31) может выполняться, а система будет неустойчивой

Применим критерий (31) для исследования устойчивости периодического решения, полученного в примере 1.
![]() ,
,
![]() ,
,
 ,
,
![]() ,
,
Введение
Релейные системы получили широкое распространение в практике автоматического регулирования. Достоинством релейных систем является простота конструкции, надежность, простота обслуживания и настройки. Релейные системы представляют собой особый класс нелинейных АСР.
В отличие от непрерывных в релейных системах регулирующее воздействие изменяется скачкообразно всякий раз, когда управляющий сигнал реле (чаще всего это ошибка регулирования) проходит через некоторые фиксированные (пороговые) значения, например, через нуль.
Релейные системы, как правило, обладают высоким быстродействием вследствие того, что управляющее воздействие в них изменяется практически мгновенно, а на исполнительное устройство действует кусочно-постоянный сигнал максимальной амплитуды. В то же время в релейных системах часто возникают автоколебания, что во многих случаях является недостатком. В настоящей работе исследуется релейная система с четырьмя различными законами управления.
Структура исследуемой системы
Исследуемая система (рис.) 1, включает в себя элемент сравнения ЭС, релейный элемент РЭ, исполнительный двигатель (идеальный интегратор с коэффициентом усиления =1), объект регулирования (апериодическое звено с тремя постоянными времени , , и коэффициентом усиления ). Значения параметров системы приведены в табл. 1 приложения А.
Статические характеристики (характеристики вход-выход) исследуемых релейных элементов приведены на рис. 2.
На рис. 2,а приведена характеристика идеального двухпозиционного реле, на рис. 2,б характеристика трехпозиционного реле с зоной нечувствительности. На рис. 2,в и 2,г приведены характеристики двухпозиционного реле с положительным и отрицательным гистерезисом соответственно.
Исследуемая АСР может быть смоделирована с помощью известных пакетов моделирования, например, SIAM или VisSim.
Замечание. В некоторых пакетах моделирования значение выходного
сигнала реле может принимать лишь значения ±1 вместо ±В, где В произвольное число. В таких случаях необходимо коэффициент усиления интегратора принять равным .
 |
Порядок выполнения работы
Для выполнения работы каждый студент получает от преподавателя вариант исходных данных (см. раздел 2).
Работа выполняется в два этапа.
Первый этап – расчетно-исследовательский (может быть выполнен вне лаборатории).
Второй этап – экспериментальный (проводится в лаборатории). На этом этапе с помощью одного из пакетов производится моделирование переходных процессов в исследуемой системе для режимов, рассчитанных на первом этапе, и осуществляется проверка точности теоретических методов.
Необходимый теоретический материал изложен в разделе 4; в разделе 5 приведены контрольные вопросы.
3.1. Расчетно – исследовательская часть
1. Получить выражения для амплитудно-частотной и фазо-частотной, вещественной и мнимой характеристик линейной части системы.
2. Рассчитать и построить амплитудно-фазовую характеристику линейной части системы. Для расчета использовать программы из пакета ТАУ. Обязательно распечатать значения вещественной и мнимой частотной характеристик (10 – 15 точек, соответствующих третьему и второму квадрантам).
4. Используя графоаналитический метод Гольдфарба, определить амплитуду и частоту автоколебаний и их устойчивость для всех четырех реле. Расчет параметров автоколебаний можно осуществить и аналитически. Качественно изобразить фазовый портрет системы для каждого из случаев.
5. Для трехпозиционного реле определить одно значение коэффициента усиления линейной части, при котором автоколебания отсутствуют, и граничное значение, при котором происходит срыв автоколебаний.
Экспериментальная часть
1. Используя один из доступных пакетов моделирования, собрать схему моделирования исследуемой АСР. По разрешению преподавателя можно воспользоваться готовой схемой. Настроить параметры схемы в соответствии с заданием.
2. Исследовать переходный процесс в системе с идеальным реле (вывести на печать), подавая на вход скачкообразное воздействие x(t)=40*1(t). Измерить амплитуду и частоту автоколебаний, сравнив их с расчетными значениями. Повторить эксперимент, установив не нулевые начальные условия (например, у(0)=10, у (1) (0)=-5).
3. Исследовать переходный процесс в системе с трехпозиционным реле для двух различных значений амплитуды входного сигнала x(t)= 40*1(t) и x(t)=15*1(t). Вывести на печать переходные процессы, измерить амплитуду и частоту автоколебаний (если они существуют), сравнить их с расчетными значениями, сделать выводы.
4. Исследовать переходные процессы в системе с трехпозиционным реле для других значений коэффициента усиления линейной части (см. п.5, раздел 3.1).
5. Исследовать переходные процессы в системе с двухпозиционными реле с гистерезисом при нулевых и не нулевых начальных условиях и x(t)=40*1(t). Вывести на печать переходные процессы, измерить амплитуду и частоту автоколебаний (если они существуют), сравнить их с расчетными значениями, сделать выводы.
Теоретическая часть
Широко распространенным методом расчета нелинейных систем является метод гармонической линеаризации (описывающих функций) .
Метод позволяет определять параметры автоколебаний (амплитуду и частоту), устойчивость автоколебаний, устойчивость положения равновесия нелинейной АСР. На базе метода гармонической линеаризации разработаны методы построения переходных процессов, анализа и синтеза нелинейных АСР .
Метод гармонической линеаризации
Как уже отмечалось, в нелинейных и в особенности релейных АСР часто наблюдаются устойчивые периодические колебания постоянной амплитуды и частоты, так называемые автоколебания . Причем автоколебания могут сохраняться даже при значительных изменениях параметров системы. Практика показала, что во многих случаях колебания регулируемой величины (рис. 3) близки к гармоническим.

Близость автоколебаний к гармоническим позволяет использовать для определения их параметров – амплитуды A и частоты w 0 – метод гармонической линеаризации. В основе метода лежит предположение, что линейная часть системы является фильтром низких частот (гипотеза фильтра). Определим условия, при которых автоколебания в системе могут быть близки к гармоническим. Ограничимся системами, которые как на рис. 3 могут быть приведены к последовательному соединению нелинейного элемента и линейной части. Предположим, что сигнал задания величина постоянная, для простоты примем его равным нулю. А сигнал ошибки (рис 3) является гармоническим:
![]() (1)
(1)
Выходной сигнал нелинейного элемента как всякий периодический сигнал – на рисунке 3 это прямоугольные колебания – может быть представлен в виде суммы гармоник ряда Фурье.
 Допустим, что линейная часть системы является фильтром низких частот (рис. 4) и пропускает только первую гармонику с частотой w 0 . Вторая с частотой 2w 0 и более высокие гармоники отфильтровываются линейной частью. В этом случае на выходе линейной
части будет существовать практически только первая гармоника
, а влиянием высших гармоник можно пренебречь
Допустим, что линейная часть системы является фильтром низких частот (рис. 4) и пропускает только первую гармонику с частотой w 0 . Вторая с частотой 2w 0 и более высокие гармоники отфильтровываются линейной частью. В этом случае на выходе линейной
части будет существовать практически только первая гармоника
, а влиянием высших гармоник можно пренебречь
Таким образом, если линейная часть системы является фильтром низких частот, а частота автоколебаний w 0 удовлетворяет условиям
, (4)
Предположение, что линейная часть системы является фильтром низких частот, называется гипотезой фильтра . Гипотеза фильтра выполняется всегда, если разность степеней полиномов знаменателя и числителя передаточной функции линейной части
![]() (5)
(5)
не меньше двух
Условие (6) выполняется для многих реальных систем. Примером могут служить апериодическое звено второго порядка и реальное интегрирующее
 ,
,
 . (7)
. (7)
При исследовании автоколебаний, близких к гармоническим, в расчет принимается только первая гармоника периодических колебаний на выходе нелинейного элемента, поскольку высшие гармоники все равно практически отфильтровываются линейной частью. В режиме автоколебаний осуществляется гармоническая линеаризация нелинейного элемента. Нелинейный элемент заменяется эквивалентным линейным с комплексным коэффициентом усиления (описывающей функцией) , зависящим от амплитуды входного гармонического сигнала:
где и – действительная и мнимая части ,
– аргумент ,
– модуль .
В общем случае зависит как от амплитуды так и частоты автоколебаний и постоянной составляющей . Физически комплексный коэффициент усиления нелинейного элемента , чаще называемый коэффициентом гармонической линеаризации , есть комплексный коэффициент усиления нелинейного элемента по первой гармонике . Модуль коэффициента гармонической линеаризации
![]() (9)
(9)
численно равен отношению амплитуды первой гармоники на выходе нелинейного элемента к амплитуде входного гармонического сигнала.
Аргумент
![]() (10)
(10)
характеризует сдвиг по фазе между первой гармоникой выходных колебаний и входным гармоническим сигналом. Для однозначных нелинейностей, таких как, например, на рис. 2,а и 2,б, действительное выражение и
Для неоднозначных нелинейностей, рис. 2,в, 2,г, определяется по формуле
где S – площадь петли гистерезиса. Площадь S берется со знаком плюс, если петля гистерезиса обходится в положительном направлении (рис. 2,в) и со знаком минус в противном случае (рис. 2,г).
В общем случае и вычисляются по формулам
 ,
,
 , (12)
, (12)
где , – нелинейная функция (характеристика нелинейного элемента).
С учетом вышеизложенного, при исследовании автоколебаний, близких к гармоническим, нелинейная АСР (рис. 3) заменяется эквивалентной с коэффициентом гармонической линеаризации вместо нелинейного элемента (рис. 5). Выходной сигнал нелинейного элемента на рис. 5 обозначен как , это
 подчеркивает, что нелинейный элемент генерирует только
подчеркивает, что нелинейный элемент генерирует только
первую гармонику колебаний. Формулы для коэффициентов гармонической линеаризации для типовых нелинейностей можно найти в литературе, например, в . В таблице приложения В приведены характеристики исследуемых релейных элементов, формулы для и их годографы. Там же приведены формулы и годографы для обратного коэффициента гармонической линеаризации , определяемого выражением
![]() , (13)
, (13)
где и действительная и мнимая часть . Годографы и строятся в координатах , и , соответственно.
Запишем теперь условия существования автоколебаний. Система на рис. 5 эквивалентна линейной. В линейной системе существуют незатухающие колебания, если она находится на границе устойчивости. Воспользуемся условием границы устойчивости по критерию Найквиста:
![]() . (14)
. (14)
Уравнение (14) естьусловие существования автоколебаний, близких к гармоническим. Если существуют действительные положительные решения А и w 0 уравнения (14), то в нелинейной АСР существуют автоколебания близкие к гармоническим. В противном случае автоколебания отсутствуют или не являются гармоническими. Уравнение (14) распадается на два – относительно действительной и мнимой части:
![]() ;
;
![]() ;
;
Поделив обе части уравнения (14) на и принимая во внимание формулу (13), получим условие существования автоколебаний в форме Гольдфарба Л.С.:
![]() . (17)
. (17)
Уравнение (17) также распадается на два:
![]() ,
,
![]() (18)
(18)
и в некоторых случаях ими удобнее пользоваться для определения параметров автоколебаний.
Гольдфарб предложил графоаналитический метод решения системы (17) и определения устойчивости автоколебаний.
В координатах , и , строятся годографы и (рис. 6,а). Если годографы пересекаются, то автоколебания существуют. Параметры автоколебаний – А и w 0 определяются в точках пересечения – частота w 0 по годографу , амплитуда по годографу . На рис. 6,а – две точки пересечения, что указывает на наличие двух предельных циклов.

|
Для определения устойчивости автоколебаний согласно Гольдфарбу штрихуется левая сторона АФХ линейной части при движении вдоль АФХ в направлении возрастания частоты (рис. 6).
Автоколебания устойчивы, если в точке пересечения годограф нелинейного элемента переходит из незаштрихованной области в заштрихованную при движении в сторону возрастания амплитуды А.
Если переход происходит из заштрихованной области в не- заштрихованную, то автоколебания не устойчивы.
На рис. 6,б качественно изображен фазовый портрет соответствующий двум предельным циклам на рис. 6,а. Точке пересечения с параметрами и на рис. 6,а соответствует не устойчивый предельный цикл на рис. 6,б, точке с параметрами и и добиться срыва автоколебаний , в этом случае годографы и не пересекаются. Этого же эффекта можно добиться, увеличив зону нечувствительности d или уменьшив амплитуду выходного сигнала реле В. Существует некоторое предельное значение К л, при котором АФХ линейной части касается Ошибка! Ошибка связи. при этом , а значение амплитуды равно . Естественно, это приводит к качественному изменению фазового портрета системы.
Метод гармонической линеаризации (гармонического баланса ) позволяет определить условия существования и параметры возможных автоколебаний в нелинейных САУ. Автоколебания определяются предельными циклами в фазовом пространстве систем. Предельные циклы разделяют пространство (в общем случае - многомерное ) на области затухающих и расходящихся процессов. В результате расчета параметров автоколебаний можно сделать заключение о их допустимости для данной системы или о необходимости изменения параметров системы.
Метод позволяет:
Определить условия устойчивости нелинейной системы;
Найти частоту и амплитуду свободных колебаний системы;
Синтезировать корректирующие цепи, для обеспечения требуемых параметров автоколебаний;
Исследовать вынужденные колебания и оценивать качество переходных процессов в нелинейных САУ.
Условия применимости метода гармонической линеаризации.
1) При использовании метода предполагается, что линейная часть системы устойчива или нейтральна.
2) Сигнал на входе нелинейного звена близок по форме к гармоническому сигналу. Это положение требует пояснений.
На рис.1 представлены структурные схемы нелинейной САУ. Схема состоит из последовательно соединенных звеньев: нелинейного звена y=F(x) и линейно-
го, которое описывается дифференциальным уравнением
При y = F(g - x) = g - x получим уравнение движения линейной системы.
Рассмотрим свободное движение, т.е. при g(t) º 0. Тогда,
В случае, когда в системе существуют автоколебания, свободное движение системы является периодическим. Непериодическое движение с течением времени оканчивается остановкой системы к некотором конечном положении (обычно, на специально предусмотренном ограничителе).
При любой форме периодического сигнала на входе нелинейного элемента сигнал на его выходе будет содержать кроме основной частоты высшие гармоники. Предположение о том, что сигнал на входе нелинейной части системы можно считать гармоническим, т.е., что
x(t)@ a×sin(wt),
где w=1/T, T - период свободных колебаний системы, равносильно предположению о том, что линейная часть системы эффективно фильтрует высшие гармоники сигнала y(t) = F(x (t)).
В общем случае при действии на входе нелинейного элемента гармонического сигнала x(t) сигнал на выходе может быть преобразован по Фурье:
Коэффициенты ряда Фурье
Для упрощения выкладок положим C 0 =0, т.е., что функция F(x) симметрична относительно начала координат. Такое ограничение не обязательно и сделано анализа. Появление коэффициентов C k ¹ 0 означает, что, в общем случае нелинейное преобразование сигнала сопровождается и фазовыми сдвигами преобразуемого сигнала. В частности, это имеет место в нелинейностях с неоднозначными характеристиками (с различного рода гистерезисными петлями), причем как запаздывание так и, в некоторых случаях, опережение по фазе .
Предположение об эффективной фильтрации означает, что амплитуды высших гармоник на выходе линейной части системы малы, то есть
Выполнению этого условия способствует то, что во многих случаях амплитуды гармоник уже непосредственно на выходе нелинейности оказываются существенно меньше амплитуды первой гармоники. Например, на выходе идеального реле при гармоническом сигнале на входе
y(t)=F(с×sin(wt))=a×sign(sin(wt))
четные гармоники отсутствуют, а амплитуда третьей гармоники в три раза меньше амплитуды первой гармоники
Сделаем оценку степени подавления высших гармоник сигнала в линейной части САУ. Для этого сделаем ряд предположений.
1) Частота свободных колебаний САУ приблизительно равна частоте среза ее линейной части. Отметим, что частота свободных колебаний нелинейной САУ может существенно отличаться от частоты свободных колебаний линейной системы так, что это допущение не всегда корректно .
2) Показатель колебательности САУ примем равным M=1.1.
3) ЛАХ в окрестностях частоты среза (w с) имеет наклон -20 дБ/дек. Границы этого участка ЛАХ связаны с показателем колебательности соотношениями
4) Частота w max является сопрягающей с участком ЛФХ, так что при w > w max наклон ЛАХ не менее минус 40 дБ/дек.
5) Нелинейность - идеальное реле с характеристикой y = sign(x) так, что на ее выходе нелинейности будут присутствовать только нечетные гармоники.
Частоты третьей гармоники w 3 = 3w c , пятой w 5 = 5w с,
lgw 3 = 0.48+lgw c ,
lgw 5 = 0.7+lgw c .
Частота w max = 1.91w с, lgw max = 0.28+lgw c . Сопрягающая частота отстоит от частоты среза на 0.28 декады.
Уменьшение амплитуд высших гармоник сигнала при их прохождении через линейную часть системы составит для третьей гармоники
L 3 = -0.28×20-(0.48-0.28)×40 = -13.6 дБ, то есть в 4.8 раза,
для пятой - L 5 = -0.28×20-(0.7-0.28)×40 = -22.4 дБ, то есть в 13 раз.
Следовательно, сигнал на выходе линейной части окажется близким к гармоническому
Это эквивалентно предположению, что система является низкочастотным фильтром.