Método de linearização harmônica: Orientações para trabalhos de laboratório. Cálculo dos coeficientes de linearização harmônica Método de linearização harmônica de auto-oscilação matlab
Objetivo do método de linearização harmônica.
A ideia do método de linearização harmônica foi proposta em 1934. N. M. Krylov e N. N. Bogolyubov. Aplicado a sistemas controle automático este método foi desenvolvido por L. S. Goldfarb e E. P. Popov. Outros nomes para este método e suas modificações são o método de equilíbrio harmônico, o método de descrição de funções, o método de linearização equivalente.
O método de linearização harmônica é um método para estudar auto-oscilações. Permite determinar as condições de existência e os parâmetros de possíveis auto-oscilações em sistemas não lineares.
Conhecer os parâmetros das auto-oscilações permite apresentar um quadro de possíveis processos no sistema e, principalmente, determinar as condições de estabilidade. Suponhamos, por exemplo, que como resultado do estudo das auto-oscilações em algum sistema não linear, obtivemos a dependência da amplitude dessas auto-oscilações A do coeficiente de transferência k parte linear do sistema, mostrada na Fig. 12.1, e sabemos que as auto-oscilações são estáveis.
Do gráfico segue-se que com um grande valor do coeficiente de transferência k, Quando k>k cr, há auto-oscilações no sistema. Sua amplitude diminui para zero à medida que o coeficiente de transmissão diminui k antes k cr. Na Fig. 12.1, as setas mostram condicionalmente a natureza dos processos transitórios em diferentes valores k: no k>k kr o processo transitório causado pelo desvio inicial reduz-se a auto-oscilações. Pode-se ver pela figura que em k< k cr, o sistema é estável. Por isso, k kr é o valor crítico do coeficiente de transmissão de acordo com a condição de estabilidade. Seu excesso leva ao fato de que o modo inicial do sistema se torna instável e nele ocorrem auto-oscilações. Consequentemente, o conhecimento das condições de existência de auto-oscilações no sistema permite determinar também as condições de estabilidade.
A ideia de linearização harmônica.
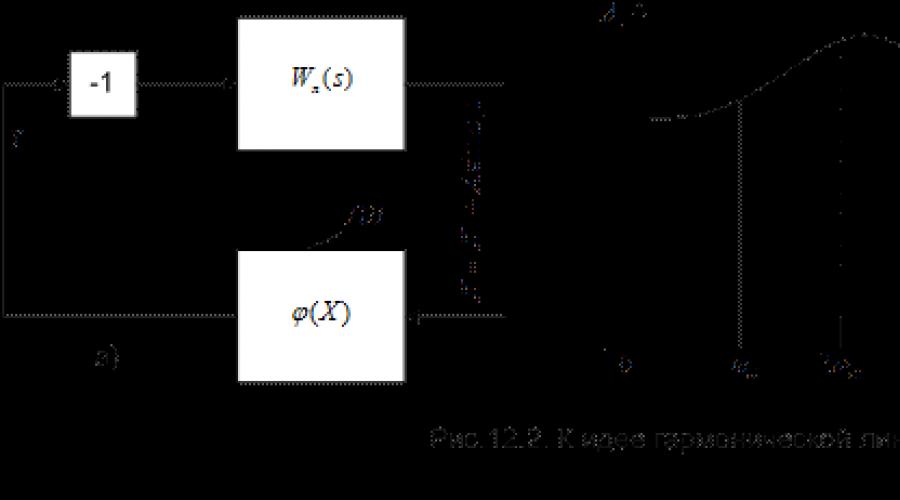
Considere um sistema não linear, cujo esquema é mostrado na Fig. 12.2, e . O sistema consiste em uma parte linear com uma função de transferência W l ( s) e um link não linear NL com uma especificação específica . Um link com um coeficiente - 1 mostra que o feedback no sistema é negativo. Acreditamos que existam auto-oscilações no sistema, cuja amplitude e frequência queremos encontrar. No modo em consideração, o valor de entrada x link não linear e saída Y são funções periódicas tempo.

O método de linearização harmônica é baseado na suposição de que as oscilações na entrada do link não linear são senoidais, ou seja, e. isso
![]() , (12.1)
, (12.1)
OndeA– a amplitude e é a frequência dessas auto-oscilações, e é uma possível componente constante no caso geral, quando as auto-oscilações são assimétricas.
De fato, as auto-oscilações em sistemas não lineares são sempre não senoidais devido à distorção de sua forma por um link não linear. Portanto, essa suposição inicial significa que o método de linearização harmônica é fundamentalmente aproximado e o escopo de sua aplicação é limitado aos casos em que as auto-oscilações na entrada de um link não linear são suficientemente próximas de senoidais. Para que isso ocorra, a parte linear do sistema não deve ultrapassar os harmônicos superiores das auto-oscilações, ou seja, ser filtro passa-baixo. Este último é ilustrado na Fig. 12.2,b . Se, por exemplo, a frequência das auto-oscilações for , então a parte linear c mostrada na Fig. 12.2, b A resposta em frequência fará o papel de um filtro passa-baixo para essas oscilações, pois o segundo harmônico, cuja frequência é igual a 2, praticamente não passará para a entrada do link não linear. Portanto, neste caso, o método de linearização harmônica é aplicável.
Se a frequência das auto-oscilações for igual a , a parte linear passará livremente pelo segundo, terceiro e outros harmônicos das auto-oscilações. Nesse caso, não se pode argumentar que as oscilações na entrada do link não linear serão suficientemente próximas de senoidais, ou seja, o pré-requisito para aplicar o método de linearização harmônica não é atendido.
Para estabelecer se a parte linear do sistema é um filtro passa-baixo e, assim, determinar a aplicabilidade do método de linearização harmônica, é necessário conhecer a frequência das auto-oscilações. No entanto, só pode ser conhecido como resultado do uso desse método. Por isso, a aplicabilidade do método de linearização harmônica deve ser determinada já no final do estudo como um teste.
Refira-se que se, como resultado desta verificação, não se confirmar a hipótese de que a parte linear do sistema desempenha o papel de filtro passa-baixas, isso não significa que os resultados obtidos sejam incorretos, embora, de facto, claro, lança dúvidas sobre eles e requer verificação adicional por alguns por outro método.
Assim, assumindo que a parte linear do sistema é um filtro passa-baixo, assumimos que as auto-oscilações na entrada do enlace não linear são senoidais, ou seja, têm a forma (12.1). Neste caso, as oscilações na saída deste link já serão não senoidais devido a sua distorção pela não linearidade. Como exemplo, na fig. 12.3, uma curva é traçada na saída de um link não linear para uma certa amplitude de um sinal de entrada puramente senoidal de acordo com a característica do link dada no mesmo local.

Fig.12.3. A passagem de uma oscilação harmônica através de um elo não linear.
Porém, como acreditamos que a parte linear do sistema passa apenas pelo harmônico fundamental das auto-oscilações, faz sentido se interessar apenas por este harmônico na saída do enlace não linear. Portanto, expandimos as oscilações de saída em uma série de Fourier e descartamos os harmônicos mais altos. Como resultado, obtemos:
![]() ;
;
![]() ; (12.3)
; (12.3)
![]() ;
;
![]() .
.
Vamos reescrever a expressão (12.2) de uma forma mais conveniente para uso subsequente, substituindo-a pelas seguintes expressões para e obtidas de (12.1):
Substituindo essas expressões em (12.2), teremos:
![]() (12.4)
(12.4)
![]() . (12.5)
. (12.5)
Aqui estão as notações:
![]() . (12.6)
. (12.6)
A equação diferencial (12.5) é válida para um sinal de entrada senoidal (12.1) e determina o sinal de saída de um link não linear sem levar em consideração harmônicos mais altos.
Os coeficientes de acordo com as expressões (12.3) para os coeficientes de Fourier são funções da componente constante , amplitude A e a frequência das auto-oscilações na entrada do link não linear. Em fixo A, e a equação (12.5) é linear. Assim, se harmônicos maiores forem descartados, então, para um sinal harmônico fixo, o link original não linear pode ser substituído por um linear equivalente descrito pela equação (12.5). Essa substituição é chamada linearização harmônica .
Na fig. 12.4 mostra esquematicamente o diagrama deste link, consistindo de dois links paralelos.

Arroz. 12.4. Enlace linear equivalente resultante da linearização harmônica.
Um link () passa o componente constante e o outro apenas o componente senoidal de auto-oscilações.
Os coeficientes são chamados coeficientes de linearização harmônica ou ganhos harmônicos: - coeficiente de transferência da componente constante, e - dois coeficientes de transferência da componente sinusoidal das auto-oscilações. Esses coeficientes são determinados pela não linearidade e pelos valores de e pelas fórmulas (12.3). Existem expressões prontas definidas por essas fórmulas para vários links não lineares típicos. Para estes e em geral para todos os links inerciais não lineares, as grandezas não dependem e são funções apenas da amplitude A E .
Quando um sinal harmônico é aplicado à entrada de um sistema linear
um sinal harmônico também é definido na saída do sistema, mas com amplitude diferente e defasado em relação à entrada. Se um sinal senoidal for aplicado à entrada de um elemento não linear, então oscilações periódicas são formadas em sua saída, mas na forma elas diferem significativamente das senoidais. Como exemplo, na fig. 8.17 mostra a natureza da mudança na variável de saída de um elemento não linear com uma característica de relé (8.14) quando oscilações senoidais (8.18) entram em sua entrada.
Expandindo o sinal periódico na saída de um elemento não linear em uma série de Fourier, nós o representamos como a soma de um componente constante e um conjunto infinito de componentes harmônicos:
![]() ,
(8.19)
,
(8.19)
 Onde –
coeficientes constantes da série de Fourier; – frequência de oscilação do primeiro harmônico (frequência fundamental), igual à frequência das oscilações senoidais de entrada; T- o período de oscilação do primeiro harmônico, igual ao período das oscilações senoidais de entrada.
Onde –
coeficientes constantes da série de Fourier; – frequência de oscilação do primeiro harmônico (frequência fundamental), igual à frequência das oscilações senoidais de entrada; T- o período de oscilação do primeiro harmônico, igual ao período das oscilações senoidais de entrada.
O sinal de saída do elemento não linear é alimentado na entrada da parte linear do ACS (ver Fig. 8.1), que, via de regra, possui uma inércia significativa. Nesse caso, os componentes de alta frequência do sinal (8.19) praticamente não passam para a saída do sistema, ou seja, a parte linear é um filtro em relação aos componentes harmônicos de alta frequência. A este respeito, e também tendo em conta que as amplitudes das componentes harmónicas diminuem com o aumento da frequência harmónica, para uma estimativa aproximada do valor de saída de um elemento não linear, num grande número de casos basta ter em conta apenas a primeira componente harmônica em .
Portanto, na ausência de uma componente constante nas oscilações de saída, a expressão (8.19) pode ser escrita aproximadamente como:
Expressando da fórmula (8.20) a função , e da derivada ![]() - função
- função ![]() , transformamos a expressão (8.20) da seguinte forma:
, transformamos a expressão (8.20) da seguinte forma:
![]() .
(8.21)
.
(8.21)
Assim, a dependência não linear do valor de saída em relação ao valor de entrada em um elemento não linear é aproximadamente substituída por uma dependência linear descrita pela expressão (8.21).
Tendo realizado a transformação de Laplace na expressão (8.21), obtemos:
![]()
Quanto aos links contínuos, introduzimos em consideração função de transferência de um elemento harmonicamente linearizado não linear , como a razão da imagem da quantidade de saída para a imagem da quantidade de entrada:
![]() .
(8.22)
.
(8.22)
Tabela 8.1
Coeficientes de linearização harmônica de não linearidades típicas
|
Característica estática de um elemento não linear | ||
|
Resposta linear com banda morta |
| |
|
Característica linear com limitação |
| |
|
Resposta linear com banda morta e clipping |
| |
|
Característica "reação" |
| |
|
Características ideais do relé | ||
|
Característica inequívoca do relé com banda morta |
| |
|
Resposta ambígua do relé com banda morta |
|
|
|
Parábola cúbica: | ||
|
Característica "loop de histerese" |
|
|






A função de transferência de um elemento não linear tem uma diferença significativa da função de transferência de um sistema linear, que reside no fato de que depende da amplitude e frequência do sinal de entrada.
A expressão (8.22) pode ser escrita como:
q(A) + q 1 (A), (8.23)
Onde q(A),q 1 (A) são os coeficientes de linearização harmônica, definidos como a razão dos coeficientes da série de Fourier para o primeiro harmônico das oscilações de saída para a amplitude das oscilações de entrada:
q(A) = q 1 (A) = . (8.24)
Substituindo na expressão (8.23) R em , obtemos uma expressão para ganho complexo do elemento não linear :
q(A) +j q 1 (A), (8.25)
que é um análogo do AFC para um link linear.
Como exemplo, vamos definir uma expressão para o coeficiente de transferência complexo de um elemento não linear com uma característica estática do relé (8.14). Coeficientes da série de Fourier A 1 E B 1 para a não linearidade indicada são:
B 1 .
É óbvio que o coeficiente B 1 será igual a zero para qualquer elemento não linear com não linearidade estática simétrica ímpar.
Onde - função de transferência da parte linear do sistema; - função de transferência de um elemento não linear após sua linearização.
Se ![]() , então a expressão (8.26) pode ser escrita como:
, então a expressão (8.26) pode ser escrita como:
Substituindo na expressão (8.27) R em , obtemos uma expressão complexa na qual é necessário separar as partes real e imaginária:
[ q(A) +j q 1 (A) ] . (8.28)
Neste caso, escrevemos a condição para ocorrência de oscilações periódicas no sistema com frequência e amplitude:
 (8.29)
(8.29)
Se as soluções do sistema (8.29) forem complexas ou negativas, o modo de auto-oscilação no sistema é impossível. A presença de soluções reais positivas para e indica a presença de auto-oscilações no sistema, que devem ser verificadas quanto à estabilidade.
Como exemplo, vamos encontrar as condições para a ocorrência de auto-oscilações no ACS, se a função de transferência de sua parte linear for igual a:
![]() (8.30)
(8.30)
e um elemento não linear do tipo "laço de histerese".
A função de transferência de um elemento não linear harmonicamente linearizado (ver Tabela 8.1) é:
![]() .
(8.31)
.
(8.31)
Substituindo as expressões (8.30) e (8.31) na expressão (8.26) e substituindo R em , encontre a expressão para:
Daqui, de acordo com a expressão (8.29), obtemos as seguintes condições para a ocorrência de auto-oscilações no sistema:

A solução do sistema de equações (8.29) costuma ser difícil, pois os coeficientes de linearização harmônica possuem uma dependência complexa da amplitude do sinal de entrada. Além disso, além de determinar a amplitude e a frequência, é necessário avaliar a estabilidade das auto-oscilações do sistema.
As condições para a ocorrência de auto-oscilações em um sistema não linear e os parâmetros dos ciclos limite podem ser investigados usando critérios de estabilidade de frequência, por exemplo, o critério de estabilidade de Nyquist. De acordo com este critério, na presença de auto-oscilações, a característica amplitude-fase de um sistema harmonicamente linearizado em malha aberta é igual a
passa pelo ponto (-1, j0). Portanto, para e vale a seguinte igualdade:
![]() .
(8.32)
.
(8.32)
A solução da equação (8.32) em relação à frequência e amplitude das auto-oscilações pode ser obtida graficamente. Para isso, no plano complexo, é necessário, alterando a frequência de 0 para , construir o hodógrafo AFC da parte linear do sistema e, alterando a amplitude A de 0 a , construa um hodógrafo da característica inversa da parte não linear , tomada com um sinal de menos. Se esses hodógrafos não se cruzarem, então o modo de auto-oscilação no sistema em estudo não existe (Fig. 8.18, b).
 Quando os hodógrafos se cruzam (Fig. 8.18, a), surgem auto-oscilações no sistema, cuja frequência e amplitude são determinadas pelos valores e no ponto de interseção.
Quando os hodógrafos se cruzam (Fig. 8.18, a), surgem auto-oscilações no sistema, cuja frequência e amplitude são determinadas pelos valores e no ponto de interseção.
Se e - se interceptam em vários pontos (Fig. 8.18, a), isso indica a presença de vários ciclos limite no sistema. Neste caso, as oscilações no sistema podem ser estáveis e instáveis.
A estabilidade do regime auto-oscilatório é estimada da seguinte forma. O modo de auto-oscilação é estável se o ponto no hodógrafo da parte não linear , correspondente a uma amplitude maior que o valor no ponto de interseção dos hodógrafos, não for coberto pelo hodógrafo da resposta de frequência do linear parte do sistema. Caso contrário, o regime auto-oscilatório é instável.
Na fig. 8.18, e os hodógrafos se cruzam nos pontos 1 e 2. Ponto 1 determina o modo instável de auto-oscilações, uma vez que o ponto hodográfico correspondente à amplitude aumentada é coberto pelo hodógrafo da resposta em frequência da parte linear do sistema. O ponto 2 corresponde a um modo estável de auto-oscilações, cuja amplitude é determinada pelo hodógrafo e a frequência - pelo hodógrafo.
Como exemplo, vamos estimar a estabilidade das auto-oscilações em dois sistemas não lineares. Assumiremos que as funções de transferência das partes lineares desses sistemas coincidem e são iguais:
![]() ,
,
mas seus elementos não lineares incluídos neles são diferentes. Deixe o primeiro sistema incluir um elemento não linear "relé ideal", descrito pelo sistema (8.14), e o segundo - um elemento não linear com uma característica estática "parábola cúbica". Usando os dados da Tabela 8.1, obtemos:
 Na fig. 8.19 mostra os hodógrafos desses sistemas juntamente com o hodógrafo AFC da parte linear do sistema. Com base no exposto, pode-se argumentar que auto-oscilações estáveis com frequência e amplitude ocorrem no primeiro sistema, e auto-oscilações instáveis ocorrem no segundo sistema.
Na fig. 8.19 mostra os hodógrafos desses sistemas juntamente com o hodógrafo AFC da parte linear do sistema. Com base no exposto, pode-se argumentar que auto-oscilações estáveis com frequência e amplitude ocorrem no primeiro sistema, e auto-oscilações instáveis ocorrem no segundo sistema.
Ministério da Educação e Ciência da Federação Russa
Universidade Técnica do Estado de Saratov
Instituto Balakovo de Engenharia, Tecnologia e Gestão
Método de linearização harmônica
Orientações para trabalhos laboratoriais da disciplina "Teoria do controlo automático" para alunos da especialidade 210100
aprovado
conselho editorial e editorial
Instituto de Tecnologia de Balakovo,
tecnologia e gestão
Balakovo 2004
O objetivo do trabalho: O estudo de sistemas não lineares usando o método de linearização harmônica (balanço harmônico), a determinação dos coeficientes de linearização harmônica para vários links não lineares. Obtenção de competências na determinação dos parâmetros de oscilações simétricas de amplitude e frequência constantes (auto-oscilações), utilizando métodos algébricos, de frequência, bem como utilizando o critério de Mikhailov.
INFORMAÇÃO BÁSICA
O método de linearização harmônica refere-se a métodos aproximados para estudar sistemas não lineares. Permite avaliar a estabilidade de sistemas não lineares de forma bastante simples e com precisão aceitável, e determinar a frequência e amplitude das oscilações estabelecidas no sistema.
Supõe-se que o ACS não linear investigado pode ser representado da seguinte forma
além disso, a parte não linear deve ter uma não linearidade
Essa não linearidade pode ser contínua ou retransmitida, inequívoca ou histerética.
Qualquer função ou sinal pode ser expandido em uma série de acordo com um sistema de funções linearmente independentes, em um caso particular, funções ortonormais. A série de Fourier pode ser usada como uma série ortogonal.
Vamos expandir o sinal de saída da parte não linear do sistema em uma série de Fourier
 ,
(2)
,
(2)
aqui estão os coeficientes de Fourier,
 ,
,
 ,
,
 .
(3)
.
(3)
Assim, o sinal de acordo com (2) pode ser representado como uma soma infinita de harmônicos com frequências crescentes ![]() etc. Este sinal é inserido na parte linear do sistema não linear.
etc. Este sinal é inserido na parte linear do sistema não linear.
Vamos denotar a função de transferência da parte linear
![]() ,
(4)
,
(4)
e o grau do polinômio do numerador deve ser menor que o grau do polinômio do denominador. Neste caso, a resposta em frequência da parte linear tem a forma

onde 1 - não possui pólos, 2 - possui pólo ou pólos.
Para a resposta em frequência, é justo escrever
Assim, a parte linear do sistema não linear é um filtro passa-alto. Nesse caso, a parte linear passará apenas por baixas frequências sem atenuação, enquanto as altas frequências serão significativamente atenuadas à medida que a frequência aumenta.
O método de linearização harmônica assume que a parte linear do sistema passará apenas pela componente DC do sinal e pela primeira harmônica. Então o sinal na saída da parte linear se parecerá com
Este sinal percorre todo o circuito fechado do sistema Fig.1 e na saída do elemento não linear sem levar em conta harmônicos superiores, conforme (2) temos
![]() .
(7)
.
(7)
No estudo de sistemas não lineares pelo método da linearização harmônica, são possíveis casos de oscilações simétricas e assimétricas. Consideremos o caso de oscilações simétricas. Aqui e.
Nós apresentamos a seguinte nota
Substituindo-os em (7), obtemos . (8)
Tendo em conta o facto de
![]() .
(9)
.
(9)
De acordo com (3) e (8) em
 ,
,
 .
(10)
.
(10)
A expressão (9) é uma linearização harmônica da não linearidade e estabelece uma relação linear entre a variável de entrada e a variável de saída em . As quantidades e são chamadas de coeficientes de linearização harmônica.
Deve-se notar que a equação (9) é linear para valores específicos e (amplitudes e frequências de oscilações harmônicas no sistema). Mas, em geral, mantém propriedades não lineares, pois os coeficientes são diferentes para diferentes e . Esta característica nos permite explorar as propriedades de sistemas não lineares usando o método de linearização harmônica [Popov E.P.].
No caso de oscilações assimétricas, a linearização harmônica da não linearidade leva à equação linear
 ,
,
 ,
,
 .
(12)
.
(12)
Assim como a equação (9), a equação linearizada (11) retém as propriedades de um elemento não linear, pois os coeficientes de linearização harmônica , , bem como a componente constante dependem tanto do deslocamento quanto da amplitude das oscilações harmônicas .
As equações (9) e (11) permitem obter as funções de transferência de elementos não lineares harmonicamente linearizados. Portanto, para vibrações simétricas
![]() ,
(13)
,
(13)
enquanto a função de transferência de frequência
depende apenas da amplitude e não depende da frequência das oscilações do sistema.
Deve-se notar que se a não linearidade ímpar-simétrica é de valor único, então no caso de oscilações simétricas, de acordo com (9) e (10), obtemos que , (15)

 (16)
(16)
e a não linearidade linearizada tem a forma
Para não linearidades ambíguas (com histerese), a integral na expressão (16) não é igual a zero, devido à diferença no comportamento da curva com crescente e decrescente, portanto, a expressão completa (9) é válida.
Vamos encontrar coeficientes de linearização harmônica para algumas características não lineares. Deixe a característica não linear assumir a forma de uma característica de relé com histerese e uma zona morta. Considere como as oscilações harmônicas passam por um elemento não linear com tal característica.

Quando a condição for atendida, ou seja, se a amplitude do sinal de entrada for menor que a zona morta, não haverá sinal na saída do elemento não linear. Se a amplitude for , então o relé comuta nos pontos A, B, C e D. Denote e .
![]() ,
,
![]() .
(18)
.
(18)
Ao calcular os coeficientes de linearização harmônica, deve-se ter em mente que, com características não lineares simétricas, as integrais nas expressões (10) estão no meio ciclo (0, ) com um aumento subsequente no resultado por um fator de dois . Por isso
 ,
,
 .
(19)
.
(19)
Para um elemento não linear com característica de relé e zona morta
 ,
,
Para um elemento não linear com uma característica de relé com histerese
 ,
,
Os coeficientes de linearização harmônica para outras características não lineares podem ser obtidos de forma semelhante.
Vamos considerar dois métodos para determinar oscilações simétricas de amplitude e frequência constantes (auto-oscilações) e estabilidade de sistemas linearizados: algébrico e de frequência. Vejamos primeiro a forma algébrica. Para um sistema fechado Fig.1, a função de transferência da parte linear é igual a
![]() .
.
Escrevemos a função de transferência harmonicamente linearizada da parte não linear
![]() .
.
A equação característica de um sistema fechado tem a forma
![]() .
(22)
.
(22)
Se ocorrerem auto-oscilações no sistema em estudo, isso indica a presença de duas raízes puramente imaginárias em sua equação característica. Portanto, substituímos na equação característica (22) o valor da raiz .
![]() .
(23)
.
(23)
Imagine
Obtemos duas equações que determinam a amplitude e a frequência desejadas
![]() ,
,
![]() .
(24)
.
(24)
Se valores positivos reais de amplitude e frequência forem possíveis na solução, auto-oscilações podem ocorrer no sistema. Se a amplitude e a frequência não tiverem valores positivos, as auto-oscilações no sistema são impossíveis.
Considere o Exemplo 1. Deixe o sistema não linear em estudo ter a forma

Neste exemplo, o elemento não linear é um elemento sensor com uma característica de relé, para o qual os coeficientes de linearização harmônica
O atuador tem uma função de transferência da forma
A função de transferência do objeto regulado é igual a
![]() .
(27)
.
(27)
Função de transferência da parte linear do sistema
![]() ,
(28)
,
(28)
Com base em (22), (25) e (28), escrevemos a equação característica de um sistema fechado
![]() ,
(29)
,
(29)
![]() ,
,
Deixe 1/seg, seg, seg, c.
Neste caso, os parâmetros do movimento periódico são iguais a
 7,071
,
7,071
,
Vamos considerar um método para determinar os parâmetros de auto-oscilação em um ACS linearizado usando o critério de Mikhailov. O método é baseado no fato de que, quando ocorrem auto-oscilações, o sistema estará no limite de estabilidade e o hodógrafo de Mikhailov, neste caso, passará pela origem.
No exemplo 2, encontramos os parâmetros de auto-oscilação, desde que o elemento não linear do sistema Fig. 4 seja um elemento sensível que possui uma característica de relé com histerese, para o qual os coeficientes de linearização harmônica
 ,
,
A parte linear permaneceu inalterada.
Escrevemos a equação característica de um sistema fechado
O hodógrafo de Mikhailov é obtido substituindo .
A tarefa é escolher tal amplitude de oscilações na qual o hodógrafo passa pela origem das coordenadas. Deve-se notar que neste caso a frequência atual é , pois é neste caso que a curva passará pela origem.
Os cálculos realizados no MATHCAD 7 em 1/seg, seg, seg, in e in forneceram os seguintes resultados. Na Fig.5, o hodógrafo de Mikhailov passa pela origem. Para melhorar a precisão dos cálculos, aumentaremos o fragmento desejado do gráfico. A Figura 6 mostra um fragmento do hodógrafo, ampliado nas proximidades da origem. A curva passa pela origem das coordenadas em .


Fig.5. Fig.6.
Nesse caso, a frequência de oscilação pode ser encontrada a partir da condição de que o módulo seja igual a zero. Para frequências
os valores dos módulos são tabulados
Assim, a frequência de oscilação é 6,38. Deve-se notar que a precisão dos cálculos pode ser facilmente aumentada.
A solução periódica resultante, determinada pelo valor da amplitude e frequência , deve ser investigada quanto à estabilidade. Se a solução for estável, ocorre um processo auto-oscilante (ciclo limite estável) no sistema. Caso contrário, o ciclo limite será instável.
A maneira mais fácil de estudar a estabilidade de uma solução periódica é usar o critério de estabilidade de Mikhailov na forma gráfica. Verificou-se que em , a curva de Mikhailov passa pela origem das coordenadas. Se você der um pequeno incremento, a curva assumirá uma posição acima de zero ou abaixo. Então, no último exemplo, vamos incrementar, isto é, e . A posição das curvas de Mikhailov é mostrada na Fig.7.

Em , a curva passa acima de zero, o que indica a estabilidade do sistema e o processo transitório amortecido. Quando a curva de Mikhailov passa abaixo de zero, o sistema é instável e o transiente é divergente. Assim, uma solução periódica com amplitude de 6 e frequência de oscilação de 6,38 é estável.
Para estudar a estabilidade de uma solução periódica, também pode ser usado um critério analítico obtido a partir do critério gráfico de Mikhailov. De fato, para saber se a curva de Mikhailov irá acima de zero, basta olhar para onde se moverá o ponto da curva de Mikhailov, que está localizado na origem das coordenadas.

Se expandirmos o deslocamento deste ponto ao longo dos eixos de coordenadas X e Y, então, para a estabilidade da solução periódica, o vetor determinado pelas projeções nos eixos de coordenadas
deve estar localizado à direita da tangente MN à curva Mikhailov, quando visto ao longo da curva na direção do aumento, cuja direção é determinada pelas projeções
Vamos escrever a condição de estabilidade analítica da seguinte forma
Nesta expressão, as derivadas parciais são tomadas em relação ao parâmetro atual da curva de Mikhailov
![]() ,
,
Deve-se notar que a expressão analítica do critério de estabilidade (31) é válida apenas para sistemas não superiores à quarta ordem, pois, por exemplo, para um sistema de quinta ordem na origem, a condição (31) pode ser satisfeita, e o sistema ficará instável

Aplicamos o critério (31) para estudar a estabilidade da solução periódica obtida no Exemplo 1.
![]() ,
,
![]() ,
,
 ,
,
![]() ,
,
Introdução
Os sistemas de relé são amplamente utilizados na prática do controle automático. A vantagem dos sistemas de relé é a simplicidade de projeto, confiabilidade, facilidade de manutenção e configuração. Os sistemas de relé são uma classe especial de ACPs não lineares.
Ao contrário do contínuo em sistemas de relé, a ação de controle muda abruptamente sempre que o sinal de controle do relé (na maioria das vezes é um erro de controle) passa por alguns valores fixos (limiar), por exemplo, por zero.
Os sistemas de relé, via de regra, têm alta velocidade devido ao fato de que a ação de controle neles muda quase instantaneamente, e um sinal constante por partes de amplitude máxima atua no atuador. Ao mesmo tempo, muitas vezes ocorrem auto-oscilações em sistemas de relé, o que em muitos casos é uma desvantagem. Neste artigo, estudamos um sistema de relés com quatro diferentes leis de controle.
A estrutura do sistema em estudo
O sistema em estudo (Fig.) 1 inclui um elemento de comparação ES, um elemento de relé RE, um atuador (um integrador ideal com ganho = 1), um objeto de controle (uma ligação aperiódica com três constantes de tempo , , e um ganho ) . Os valores dos parâmetros do sistema são dados na Tabela. 1 apêndice A.
As características estáticas (características de entrada-saída) dos elementos de relé estudados são mostradas na fig. 2.
Na fig. 2,a mostra as características de um relé ideal de duas posições, na fig. 2b característica de um relé de três posições com uma zona morta. Na fig. 2c e 2d mostram as características de um relé de duas posições com histerese positiva e negativa, respectivamente.
O ACP em estudo pode ser modelado usando pacotes de modelagem conhecidos, como SIAM ou VisSim.
Comente. Em alguns pacotes de simulação, o valor da saída
o sinal do relé só pode assumir os valores ±1 em vez de ±B, onde B é um número arbitrário. Nesses casos, é necessário tomar o ganho do integrador igual a .
 |
ordem de trabalho
Para completar o trabalho, cada aluno recebe uma versão dos dados iniciais do professor (ver seção 2).
O trabalho é realizado em duas etapas.
A primeira etapa é a pesquisa computacional (pode ser realizada fora do laboratório).
A segunda etapa é experimental (realizada em laboratório). Nesta etapa, com o auxílio de um dos pacotes, são simulados processos transitórios no sistema em estudo para os modos calculados na primeira etapa, e é verificada a precisão dos métodos teóricos.
O material teórico necessário é apresentado na Seção 4; a seção 5 contém perguntas de controle.
3.1. Liquidação - parte de pesquisa
1. Obter expressões para frequência-amplitude e frequência-fase, características reais e imaginárias da parte linear do sistema.
2. Calcule e construa a característica amplitude-fase da parte linear do sistema. Para o cálculo, utilize os programas do pacote TAU. Necessariamente imprimir valores de resposta de frequência reais e imaginários(10 - 15 pontos correspondentes a terceiro e segundo quadrantes).
4. Usando o método gráfico-analítico de Goldfarb, determine a amplitude e frequência das auto-oscilações e sua estabilidade para todos os quatro relés. Os parâmetros de auto-oscilação também podem ser calculados analiticamente. Descreva qualitativamente o retrato de fase do sistema para cada um dos casos.
5. Para um relé de três posições, determine um valor do ganho da parte linear, no qual não há auto-oscilações, e o valor limite, no qual as auto-oscilações são interrompidas.
parte experimental
1. Utilizando um dos pacotes de simulação disponíveis, monte o circuito de simulação do ACP em estudo. Com a permissão do professor, você pode usar o esquema finalizado. Defina os parâmetros do esquema de acordo com a tarefa.
2. Investigue o processo transiente em um sistema com um relé ideal (print out), aplicando uma ação de salto x(t)=40*1(t) à entrada. Meça a amplitude e a frequência das auto-oscilações, comparando-as com os valores calculados. Repita o experimento definindo condições iniciais diferentes de zero (por exemplo, y(0)=10, y(1)(0)=-5).
3. Investigue o processo transiente em um sistema com um relé de três posições para dois valores diferentes da amplitude do sinal de entrada x(t)= 40*1(t) e x(t)=15*1(t). Imprima processos transitórios, meça a amplitude e a frequência das auto-oscilações (se existirem), compare-os com os valores calculados e tire conclusões.
4. Investigar processos transitórios em um sistema com relé de três posições para outros valores do ganho da parte linear (ver cláusula 5, seção 3.1).
5. Investigar processos transitórios em um sistema com relés de duas posições com histerese em condições iniciais zero e diferentes de zero e x(t)=40*1(t). Imprima processos transitórios, meça a amplitude e a frequência das auto-oscilações (se existirem), compare-os com os valores calculados e tire conclusões.
parte teórica
Um método amplamente utilizado para calcular sistemas não lineares é o método de linearização harmônica (funções descritivas).
O método permite determinar os parâmetros das auto-oscilações (amplitude e frequência), a estabilidade das auto-oscilações e a estabilidade da posição de equilíbrio de um ACP não linear. Com base no método de linearização harmônica, foram desenvolvidos métodos para construção de processos transitórios, análise e síntese de ASR não linear.
Método de linearização harmônica
Como já observado, em ACPs não lineares e, em particular, de relé, muitas vezes são observados oscilações periódicas estáveis amplitude e frequência constantes, os chamados auto-oscilações. Além disso, as auto-oscilações podem persistir mesmo com mudanças significativas nos parâmetros do sistema. A prática tem mostrado que em muitos casos as flutuações do valor regulado (Fig. 3) são próximas do harmônico.

A proximidade das auto-oscilações com as harmônicas possibilita a utilização do método de linearização harmônica para determinar seus parâmetros – amplitude A e frequência w 0 . O método é baseado na suposição de que a parte linear do sistema é um filtro passa-baixo (hipótese do filtro). Vamos determinar as condições sob as quais as auto-oscilações no sistema podem estar próximas das harmônicas. Nos restringimos a sistemas que, como na Fig. 3 pode ser reduzido a uma conexão em série de um elemento não linear e uma parte linear. Assumimos que o sinal de referência é um valor constante; para simplificar, vamos tomá-lo igual a zero. E o sinal de erro (Figura 3) é harmônico:
![]() (1)
(1)
O sinal de saída de um elemento não linear, como qualquer sinal periódico - na Figura 3 são oscilações retangulares - pode ser representado como a soma dos harmônicos da série de Fourier.
 Vamos assumir que a parte linear do sistema é um filtro passa-baixo (Fig. 4) e passa apenas o primeiro harmônico com frequência w 0 . O segundo com frequência de 2w 0 e harmônicos superiores são filtrados pela parte linear. Neste caso, em saída linear
partes existirão praticamente apenas primeiro harmônico
, e a influência dos harmônicos mais altos pode ser desprezada
Vamos assumir que a parte linear do sistema é um filtro passa-baixo (Fig. 4) e passa apenas o primeiro harmônico com frequência w 0 . O segundo com frequência de 2w 0 e harmônicos superiores são filtrados pela parte linear. Neste caso, em saída linear
partes existirão praticamente apenas primeiro harmônico
, e a influência dos harmônicos mais altos pode ser desprezada
Assim, se a parte linear do sistema for um filtro passa-baixa e a frequência de auto-oscilação w 0 satisfizer as condições
, (4)
A suposição de que a parte linear do sistema é um filtro passa-baixa é chamada hipótese de filtro . A hipótese do filtro é sempre satisfeita se a diferença entre os graus dos polinômios do denominador e numerador da função de transferência da parte linear
![]() (5)
(5)
ao menos dois
A condição (6) é satisfeita para muitos sistemas reais. Um exemplo é a ligação aperiódica de segunda ordem e a integração real
 ,
,
 . (7)
. (7)
Ao estudar as auto-oscilações próximas do harmônico, apenas o primeiro harmônico das oscilações periódicas na saída de um elemento não linear é levado em consideração, pois os harmônicos superiores são praticamente filtrados pela parte linear de qualquer maneira. No modo de auto-oscilação, linearização harmônica elemento não linear. O elemento não linear é substituído por um elemento linear equivalente com ganho complexo (função de descrição) dependendo da amplitude do sinal harmônico de entrada:
onde e são as partes reais e imaginárias de ,
- argumento,
- módulo.
No caso geral, depende tanto da amplitude quanto da frequência das auto-oscilações e da componente constante. Ganho de elemento não linear fisicamente complexo, mais comumente referido como coeficiente de linearização harmônica , Há ganho complexo do elemento não linear no primeiro harmônico. Módulo do coeficiente de linearização harmônica
![]() (9)
(9)
numericamente igual à razão da amplitude do primeiro harmônico na saída do elemento não linear para a amplitude do sinal harmônico de entrada.
Argumento
![]() (10)
(10)
caracteriza o deslocamento de fase entre o primeiro harmônico das oscilações de saída e o sinal harmônico de entrada. Para não linearidades de valor único, como, por exemplo, na Fig. 2a e 2b, a expressão real e
Para não linearidades ambíguas, fig. 2, c, 2, d, é determinado pela fórmula
onde S é a área do loop de histerese. A área S é tomada com um sinal de mais se o loop de histerese for contornado na direção positiva (Fig. 2c) e com um sinal de menos caso contrário (Fig. 2d).
No caso geral, e são calculados pelas fórmulas
 ,
,
 , (12)
, (12)
onde , é uma função não linear (característica de um elemento não linear).
Diante do exposto, ao se estudar auto-oscilações próximas ao harmônico, o ASR não linear (Fig. 3) é substituído por um equivalente com coeficiente de linearização harmônica ao invés de um elemento não linear (Fig. 5). O sinal de saída do elemento não linear na fig. 5 é marcado como , é
 enfatiza que o elemento não linear gera apenas
enfatiza que o elemento não linear gera apenas
o primeiro harmônico das vibrações. Fórmulas para os coeficientes de linearização harmônica para não linearidades típicas podem ser encontradas na literatura, por exemplo, em. A tabela no Apêndice B mostra as características dos elementos do relé estudados, suas fórmulas e seus hodógrafos. Existem também fórmulas e hodogramas para o coeficiente recíproco de linearização harmônica, definido pela expressão
![]() , (13)
, (13)
onde estão as partes reais e imaginárias de . Os hodógrafos e são plotados nas coordenadas , e , respectivamente.
Vamos agora escrever as condições para a existência de auto-oscilações. O sistema da fig. 5 é equivalente a linear. Em um sistema linear, existem oscilações não amortecidas se ele estiver no limite de estabilidade. Usamos a condição do limite de estabilidade de acordo com o critério de Nyquist:
![]() . (14)
. (14)
Equação (14) Há a condição para a existência de auto-oscilações, próximo ao harmônico. Se houver muito positivo soluções A e w 0 da equação (14), então no ASR não linear existem auto-oscilações próximas às harmônicas. Caso contrário, as auto-oscilações estão ausentes ou não são harmônicas. A equação (14) se divide em duas - com relação às partes real e imaginária:
![]() ;
;
![]() ;
;
Dividindo ambas as partes da equação (14) por e levando em consideração a fórmula (13), obtemos a condição para a existência de auto-oscilações na forma de Goldfarb L.S.:
![]() . (17)
. (17)
A equação (17) também se divide em duas:
![]() ,
,
![]() (18)
(18)
e em alguns casos é mais conveniente usá-los para determinar os parâmetros das auto-oscilações.
Goldfarb propôs um método gráfico-analítico para resolver o sistema (17) e determinar a estabilidade das auto-oscilações.
Nas coordenadas , e , hodógrafos e são construídos (Fig. 6a). Se os hodógrafos se cruzam, então auto-oscilações existem. Os parâmetros das auto-oscilações - A e w 0 são determinados nos pontos de interseção - a frequência w 0 de acordo com o hodógrafo, a amplitude de acordo com o hodógrafo. Na fig. 6a – dois pontos de interseção, o que indica a presença de dois ciclos limites.

|
Para determinar a estabilidade das auto-oscilações, de acordo com Goldfarb, o lado esquerdo do AFC da parte linear é sombreado ao se mover ao longo do AFC na direção do aumento da frequência (Fig. 6).
As auto-oscilações são estáveis se, no ponto de interseção, o hodógrafo do elemento não linear passar da área não sombreada para a área sombreada ao se mover na direção de amplitude crescente A.
Se a transição ocorrer da região sombreada para a não sombreada, então as auto-oscilações não são estáveis.
Na fig. 6b representa qualitativamente o retrato de fase correspondente aos dois ciclos limite na fig. 6, a. O ponto de interseção com os parâmetros e na fig. 6a corresponde ao ciclo limite instável na Fig. 6, b, para um ponto com parâmetros e e para obter uma quebra de auto-oscilações , neste caso, os hodógrafos e não se cruzam. O mesmo efeito pode ser alcançado aumentando a zona morta d ou reduzindo a amplitude do sinal de saída do relé B. Existe um certo valor limite K l no qual o AFC da parte linear toca Erro! Erro de comunicação. em que , e o valor da amplitude é . Naturalmente, isso leva a uma mudança qualitativa no retrato de fase do sistema.
O método de linearização harmônica (equilíbrio harmônico) permite determinar as condições de existência e os parâmetros de possíveis auto-oscilações em sistemas de controle automático não linear. As auto-oscilações são determinadas por ciclos limite no espaço de fase dos sistemas. Os ciclos limite dividem o espaço (geralmente - multidimensional) nos domínios dos processos amortecidos e divergentes. Como resultado do cálculo dos parâmetros das auto-oscilações, pode-se tirar uma conclusão sobre sua admissibilidade para um determinado sistema ou sobre a necessidade de alterar os parâmetros do sistema.
O método permite:
Determinar as condições de estabilidade de um sistema não linear;
Encontre a frequência e a amplitude das oscilações livres do sistema;
Sintetizar circuitos corretivos para garantir os parâmetros exigidos de auto-oscilações;
Investigar oscilações forçadas e avaliar a qualidade de processos transitórios em sistemas de controle automático não linear.
Condições de aplicabilidade do método de linearização harmônica.
1) Ao usar o método, assume-se que linear parte do sistema é estável ou neutra.
2) O sinal na entrada do link não linear tem forma próxima ao sinal harmônico. Esta disposição carece de alguma explicação.
A Figura 1 mostra os diagramas de blocos do ACS não linear. O circuito consiste em elos conectados em série: um elo não linear y=F(x) e um elo linear
th, que é descrito pela equação diferencial
Para y = F(g - x) = g - x obtemos a equação de movimento de um sistema linear.
Considere a livre circulação, ou seja, para g(t) º 0. Então,
No caso de existirem auto-oscilações no sistema, o movimento livre do sistema é periódico. O movimento não periódico ao longo do tempo termina com o sistema parando em alguma posição final (geralmente, em um limitador especialmente fornecido).
Com qualquer forma de sinal periódico na entrada de um elemento não linear, o sinal em sua saída conterá, além da frequência fundamental, harmônicos mais altos. A suposição de que o sinal na entrada da parte não linear do sistema pode ser considerado harmônico, ou seja, que
x(t)@a×sin(wt),
onde w=1/T, T é o período de oscilações livres do sistema, é equivalente a supor que a parte linear do sistema efetivamente filtros harmônicos mais altos do sinal y(t) = F(x(t)).
No caso geral, quando um elemento não linear de um sinal harmônico x(t) atua na entrada, o sinal de saída pode ser transformado por Fourier:
Coeficientes da série de Fourier
Para simplificar os cálculos, definimos C 0 =0, ou seja, que a função F(x) é simétrica em relação à origem. Tal limitação não é necessária e é feita por análise. O aparecimento dos coeficientes C k ¹ 0 significa que, no caso geral, a transformação não linear do sinal é acompanhada por deslocamentos de fase do sinal convertido. Em particular, isso ocorre em não linearidades com características ambíguas (com vários tipos de loops de histerese), tanto de atraso quanto, em alguns casos, avanço de fase.
A suposição de filtragem efetiva significa que as amplitudes dos harmônicos mais altos na saída da parte linear do sistema são pequenas, ou seja,
O cumprimento desta condição é facilitado pelo fato de que em muitos casos as amplitudes dos harmônicos já diretamente na saída da não linearidade acabam sendo significativamente menores que a amplitude do primeiro harmônico. Por exemplo, na saída de um relé ideal com um sinal harmônico na entrada
y(t)=F(с×sin(wt))=a×sign(sin(wt))
não há harmônicos pares, e a amplitude do terceiro harmônico em três vezes menor que a amplitude do primeiro harmônico
Vamos fazer avaliação do grau de supressão harmônicos mais altos do sinal na parte linear do ACS. Para fazer isso, fazemos uma série de suposições.
1) Frequência de oscilações livres do ACS aproximadamente igual à frequência de corte sua parte linear. Observe que a frequência de oscilações livres de um sistema de controle automático não linear pode diferir significativamente da frequência de oscilações livres de um sistema linear, de modo que essa suposição nem sempre é correta.
2) Tomamos o índice de oscilação do ACS igual a M=1,1.
3) LAH nas proximidades da frequência de corte (w s) tem uma inclinação de -20 dB/dec. Os limites desta seção do LAH estão relacionados ao índice de oscilação pelas relações
4) A frequência w max é conjugada com a seção LPH, de modo que quando w > w max a inclinação LAH é de pelo menos menos 40 dB/dec.
5) Não linearidade - um relé ideal com característica y = sgn(x) de forma que apenas harmônicos ímpares estarão presentes em sua saída não linear.
As frequências do terceiro harmônico w 3 \u003d 3w c, o quinto w 5 \u003d 5w c,
lgw 3 = 0,48+lgw c ,
lgw 5 = 0,7+lgw c .
Frequência w max = 1,91w s, lgw max = 0,28+lgw s. A frequência de canto está a 0,28 décadas da frequência de corte.
A diminuição das amplitudes dos harmônicos maiores do sinal conforme eles passam pela parte linear do sistema será para o terceiro harmônico
L 3 \u003d -0,28 × 20-(0,48-0,28) × 40 \u003d -13,6 dB, ou seja, 4,8 vezes,
para o quinto - L 5 \u003d -0,28 × 20-(0,7-0,28) × 40 \u003d -22,4 dB, ou seja, 13 vezes.
Conseqüentemente, o sinal na saída da parte linear estará próximo dos harmônicos
Isso é equivalente a assumir que o sistema é um filtro passa-baixa.